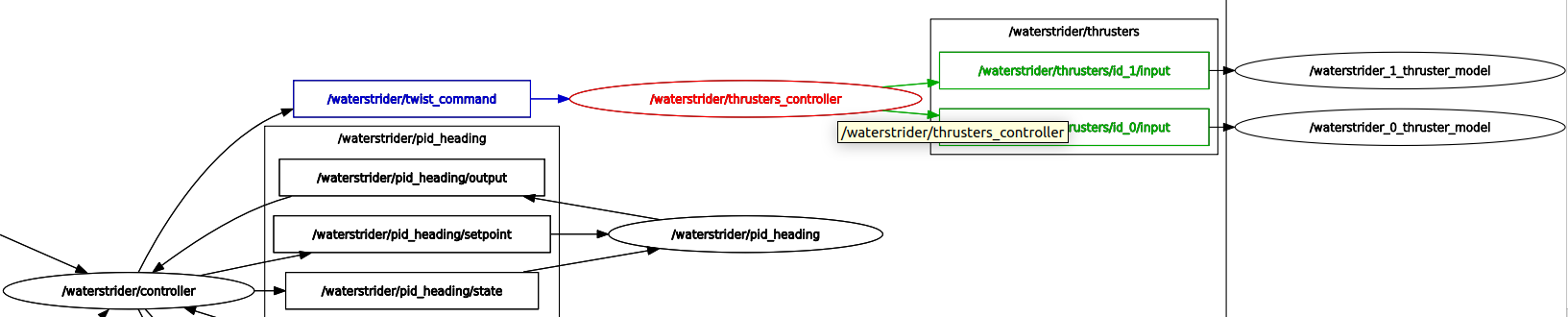
Проблема неортогональности Ортогональные регуляторы В качестве примера рассмотрен Blueye X3 ROV. Неортогональные регуляторы Статья с описанием аппарата Применяемый нами способ решения неоднозначности Мы абстрагируемся от конкретной схемы двигателей аппарата, скрывая работу со схемой двигателей внутрь ноды thrusters_controller. Тем самым мы можем ввести условно-независимое управление по каждой из шести интересующих нас осей движения аппарата. Слайд 4 Слайд 6