rviz: 2d Goal Pose
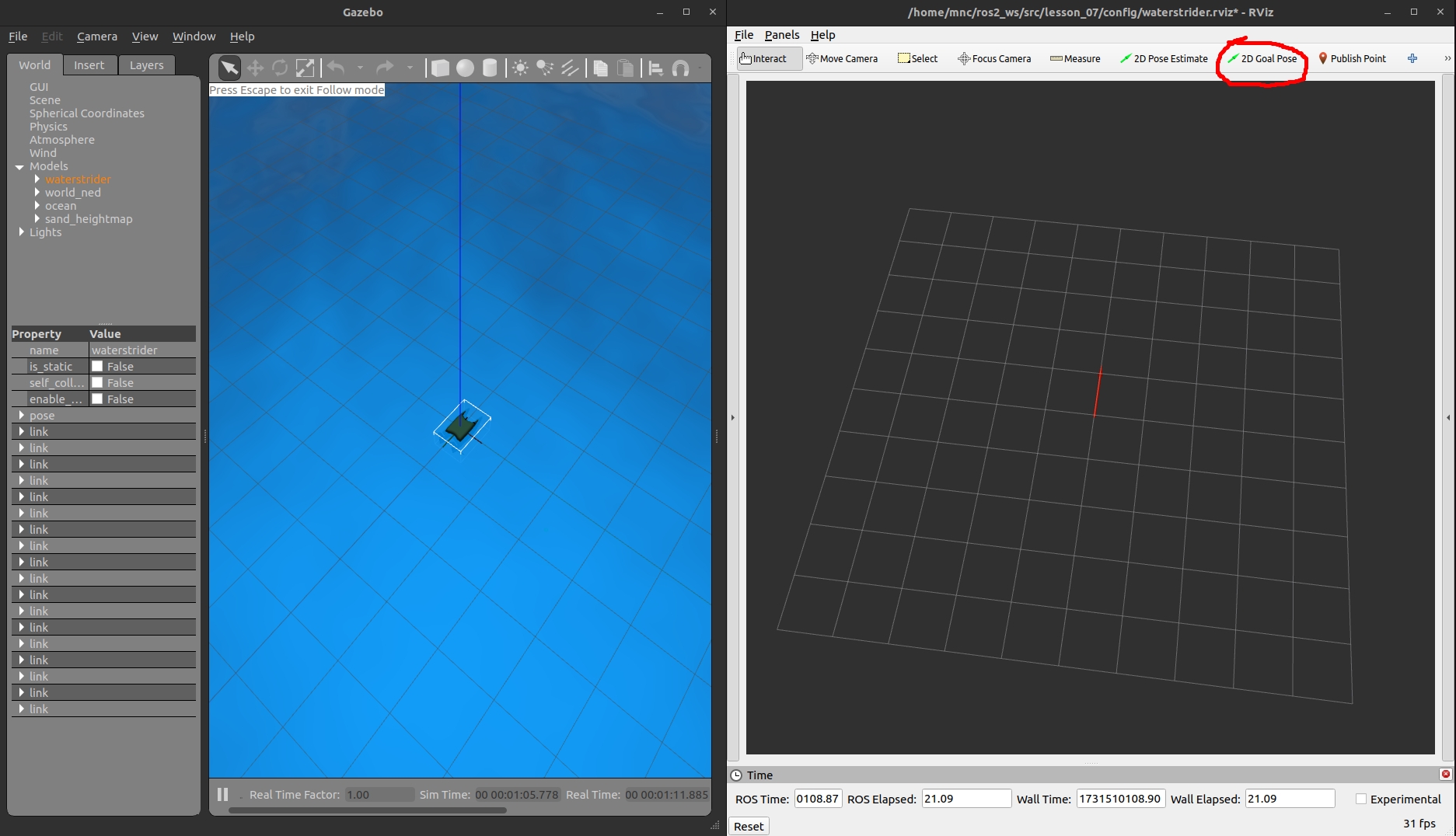
Получение команды роботом
$ ros2 topic info /goal_pose
Type: geometry_msgs/msg/PoseStamped
...
$ ros2 topic echo /goal_pose
header:
stamp:
sec: 1731513288
nanosec: 778718457
frame_id: world
pose:
position:
x: -2.4587173461914062
y: 2.2831757068634033
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---