$ sudo apt update
$ sudo apt install ros-jazzy-smach ros-jazzy-smach-rosОсновы программировния морских роботов
Машина состояний SMACH
План занятия
Что такое машина состояний
Машина состояний (Finite State Machine, FSM) — это модель поведения системы, в которой в каждый момент времени система находится в одном состоянии или в конкуренции, и может переходить в другое состояние, когда происходят определённые события.
Установка и окружение
Основные элементы: Состояния (State)
Состояние описывает, чем сейчас занята система: какое действие она выполняет или в каком режиме находится. Примеры состояний в роботе:
"Инициализируем датчики"
"Ждём команду"
"Едем к точке"
"Ищем объект(ы)"
"Возвращаемся"
Основные элементы: Состояния (State)
Основные элементы: Переходы (Transition)
Переход определяет, в какое состояние мы движемся дальше после завершения текущего.
Переходы задаются при добавлении состояния в машину:
# Добавляем новое состояние
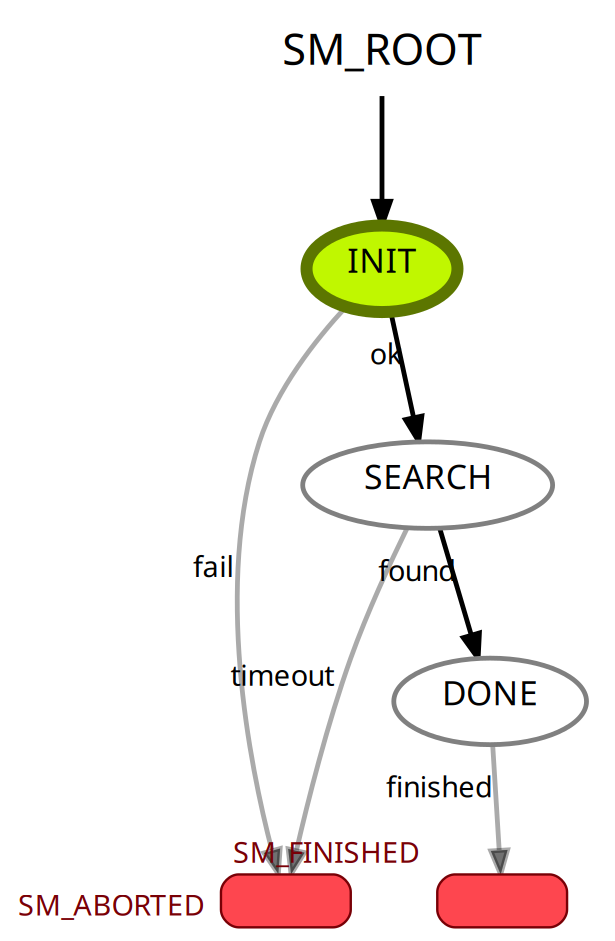
smach.StateMachine.add('INIT',InitState(node),
# Статусы переходов на следующее состояние
transitions={'ok': 'SEARCH','fail': 'SM_ABORTED'})То есть:
если INIT вернул 'ok' → переходим в SEARCH
если 'fail' → переходим в SM_ABORTED
Переходы всегда явно указаны словарём.
Основные элементы: Outcome (результат выполнения состояния)
Простой пример
Продолжение: Простой пример
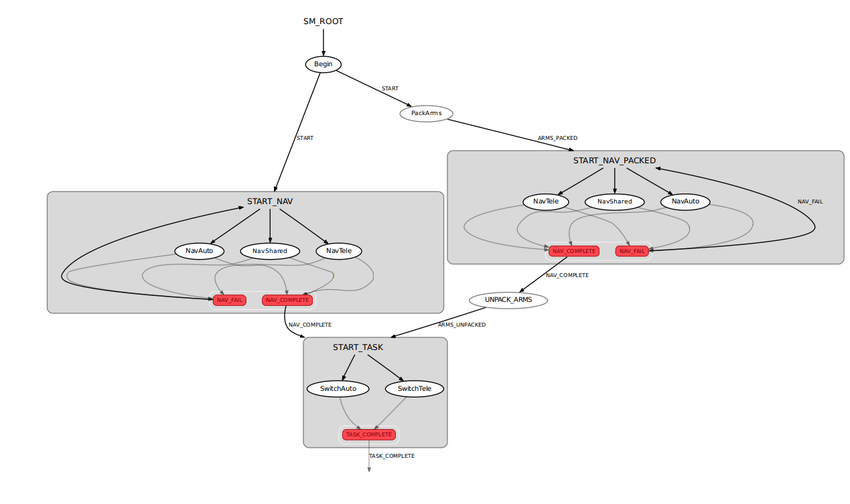
Smach Viewer
Для более удобного взаимодействия с smach существует утилита для визуализации smach-viewer.
Она позволяет отслеживать статус и строит дерево состояний
Данное приложение плохо портировали на второй ROS, поэтому время от времени оно может работать с багами: не отображает текущего состояния, не показывает визуализацию. Данную утилиту следует использовать для приблизительной оценки перехода состояний._
Сегодня я многое понял
Узнал, что такое машина состояний
Установил smach и настроил окружение
Состояния, переходы, outcome
Разобрал простой пример машины состояний