ros2 launch lesson_07 main.launch.py lesson_num:=0Основы программировния морских роботов
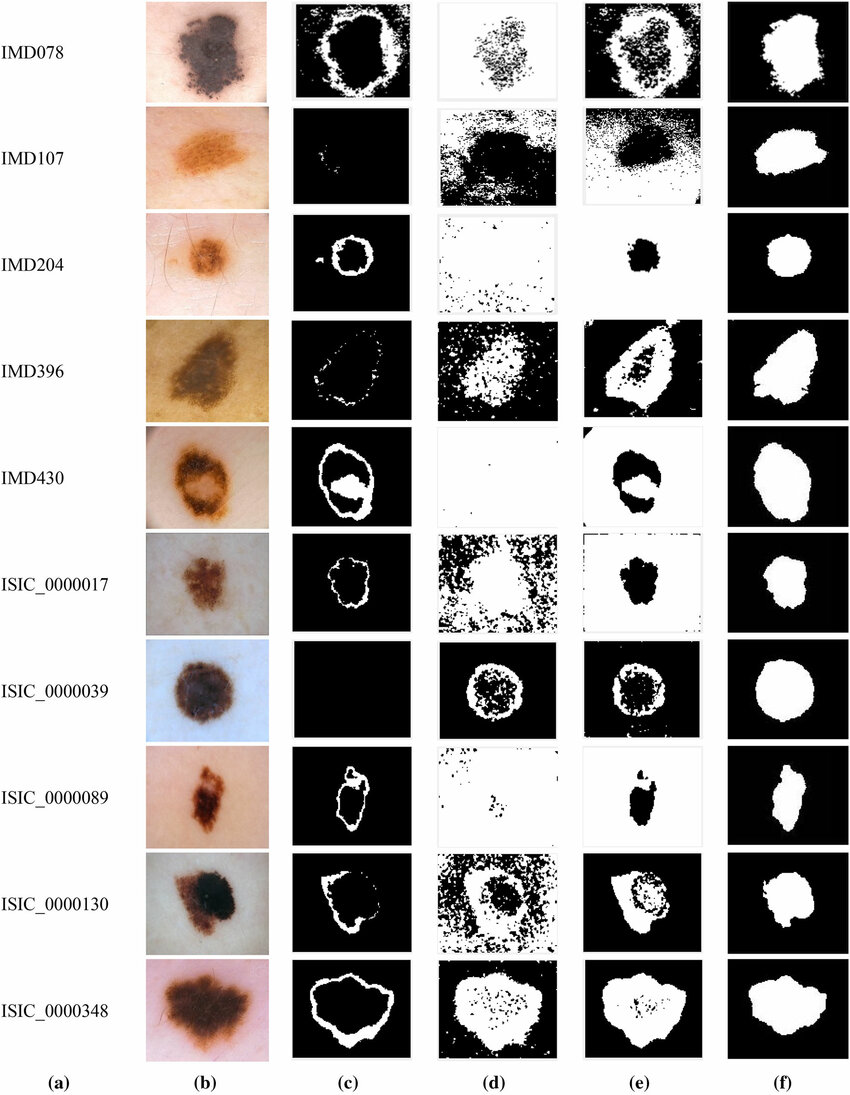
Цветовая сегментация
План занятия
Подготовка
Склонировать репозиторий
Запуск ПО
Обновить симулятор: https://sdb.smtu.ru/nextcloud/s/simulator
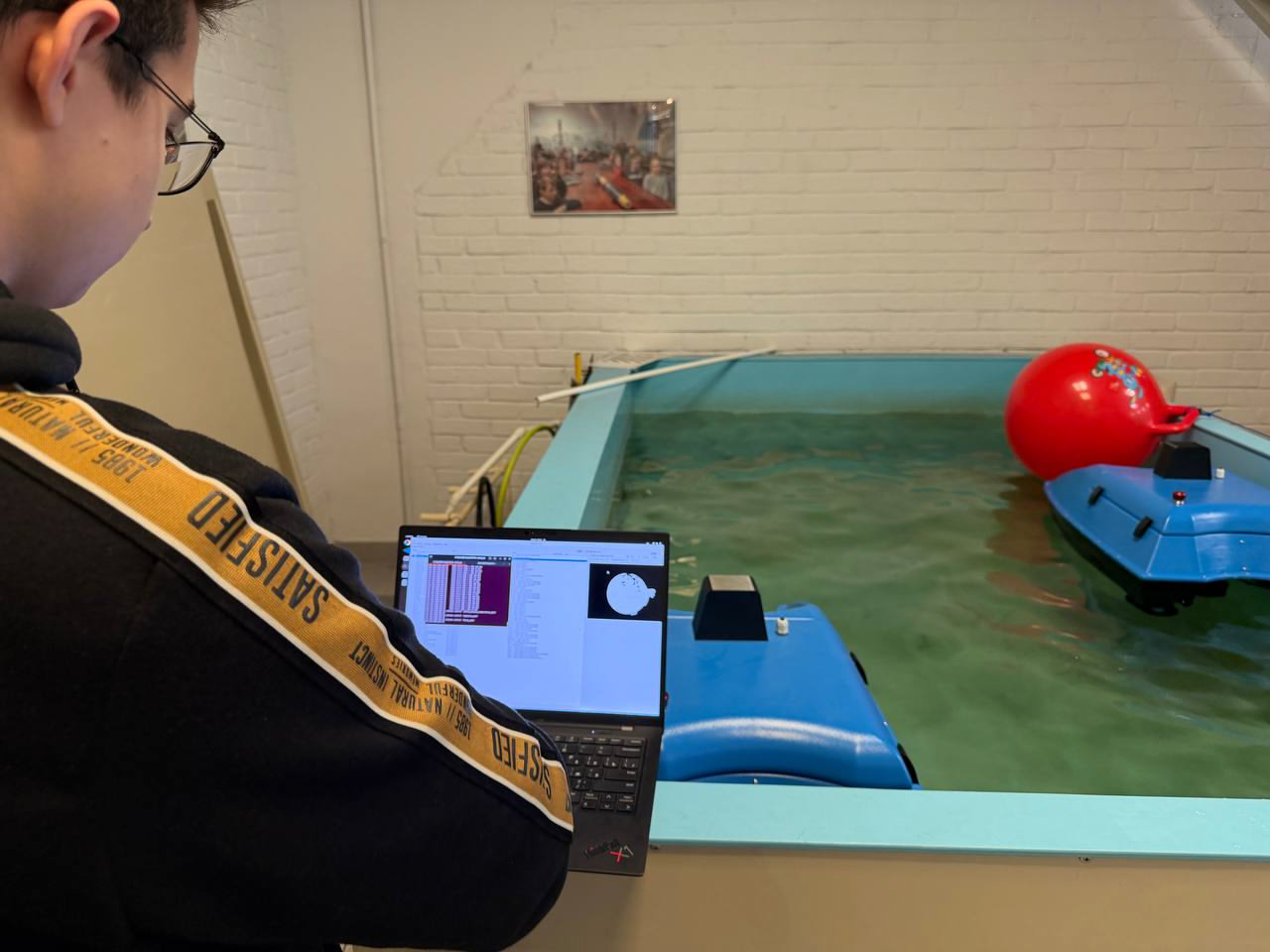
Запустить симулятор
Выбрать сцену "Сбор датасета"
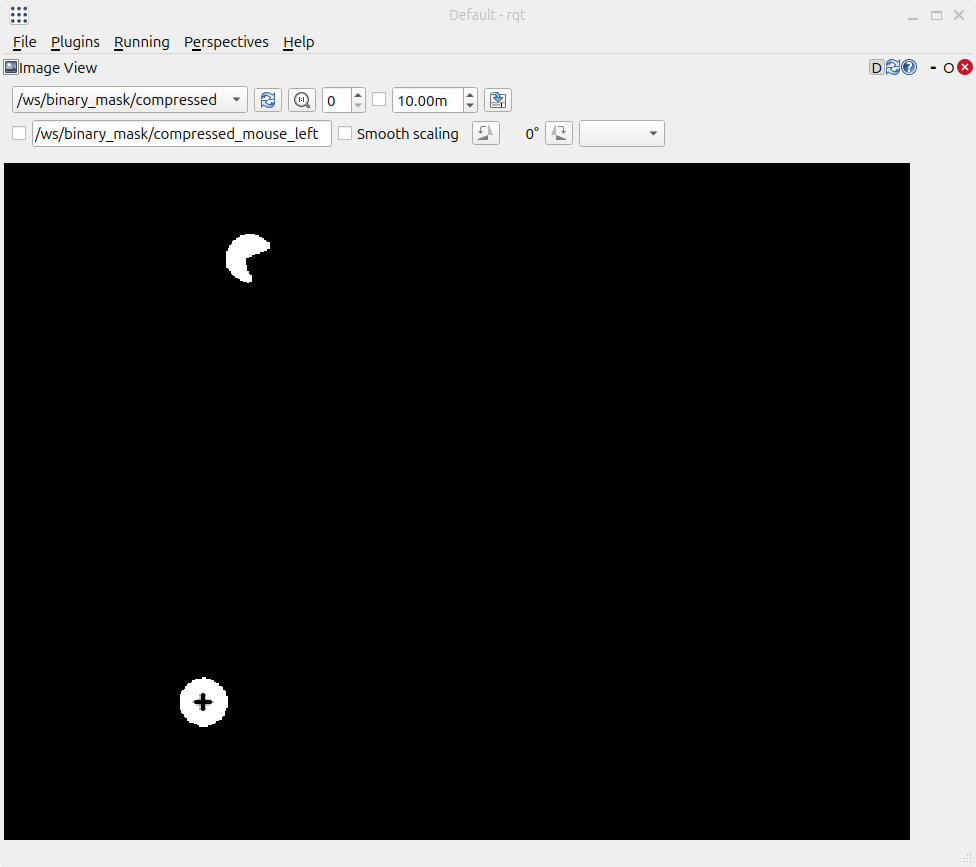
Запустить RQT
Вывести изображение с нижней камеры и навестись на маркеры
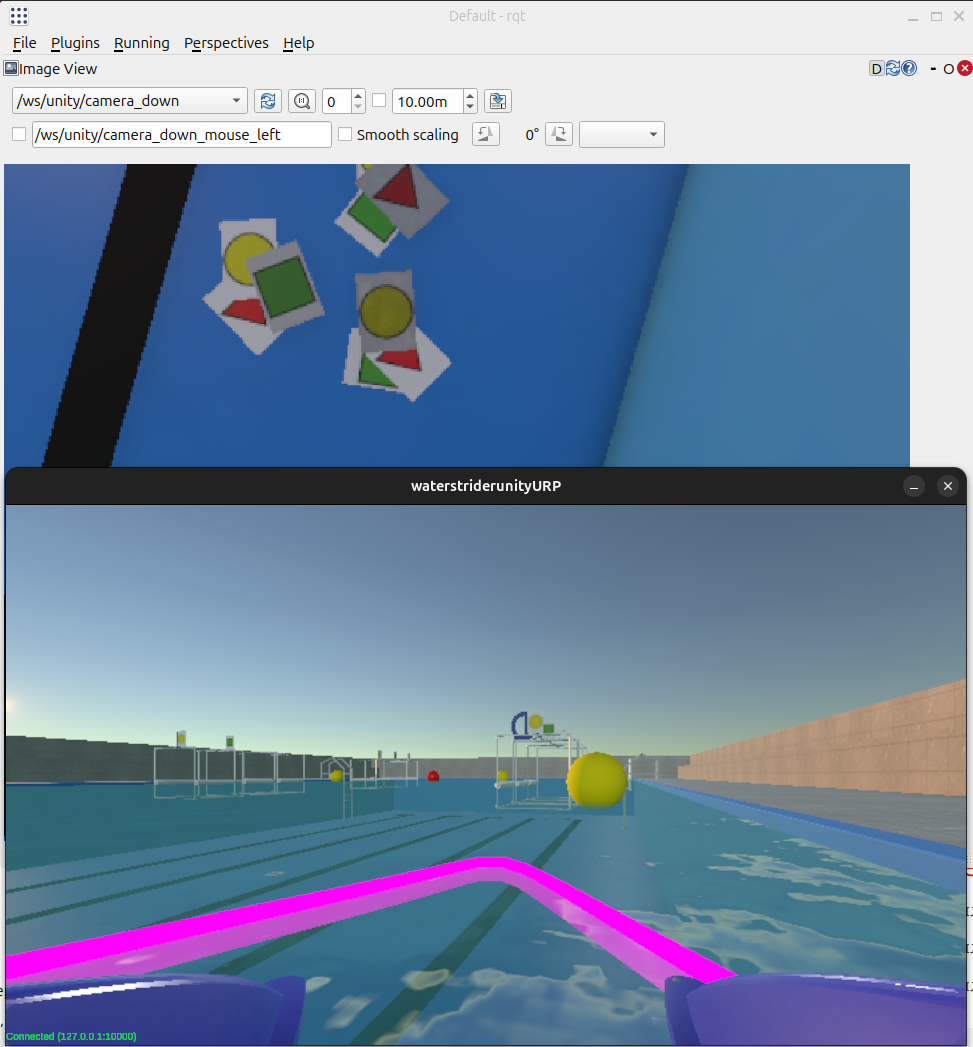
Цветовая сегментация
Пример: step_0
cv2.inRange
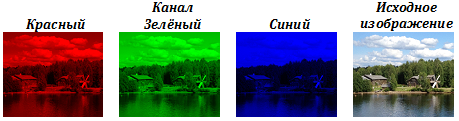
Маска в пространстве RGB
Нижняя граница:
[0, 0, 0]Верхняя граница:
[255, 50, 50]
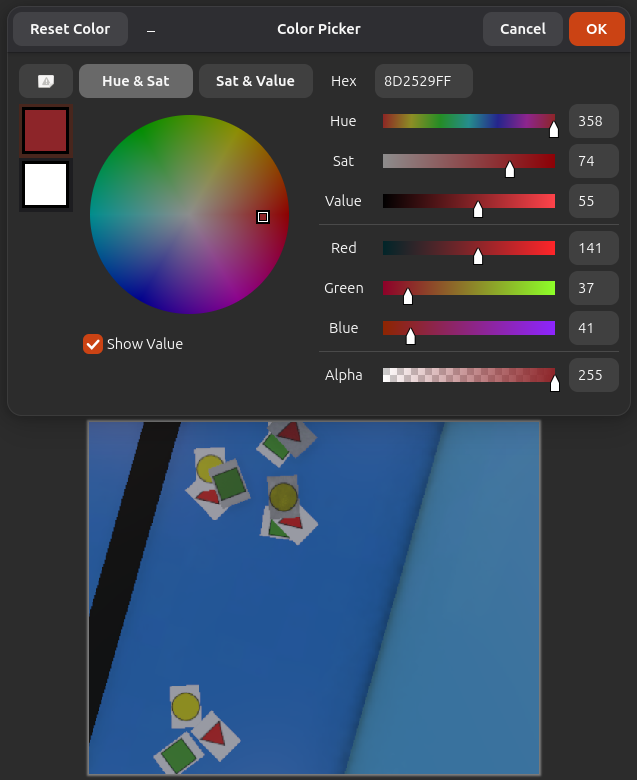
Получение информации через графический редактор
Сделать скриншот
Вставить в графический редактор
pinta, gimp и т.д.
Воспользоваться инструментом "пипетка"
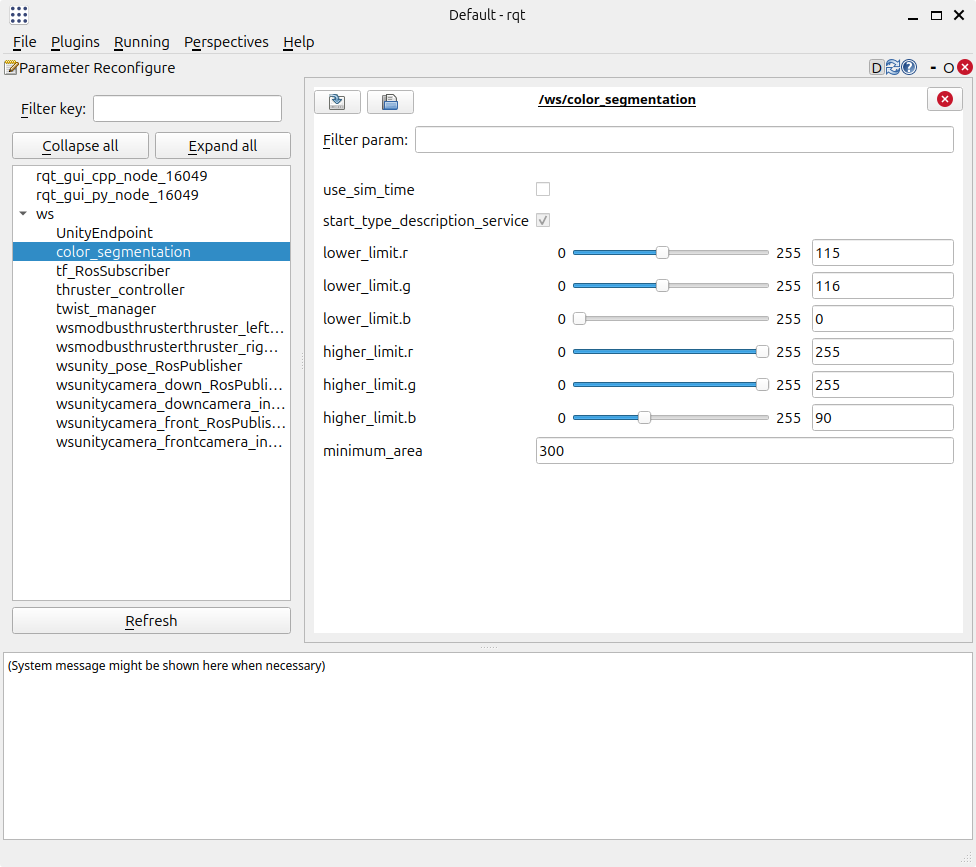
Сервер параметров ROS
Объявление параметров
Просмотр и редактирование параметров
rqt
Plugins → Configuration → Dynamic Reconfigure
Можно работать и через консоль (см. доп. материалы)
Пример: step_1
Сохранение конфгурации в yaml
Загрузка конфигурации из yaml-файла (launch)
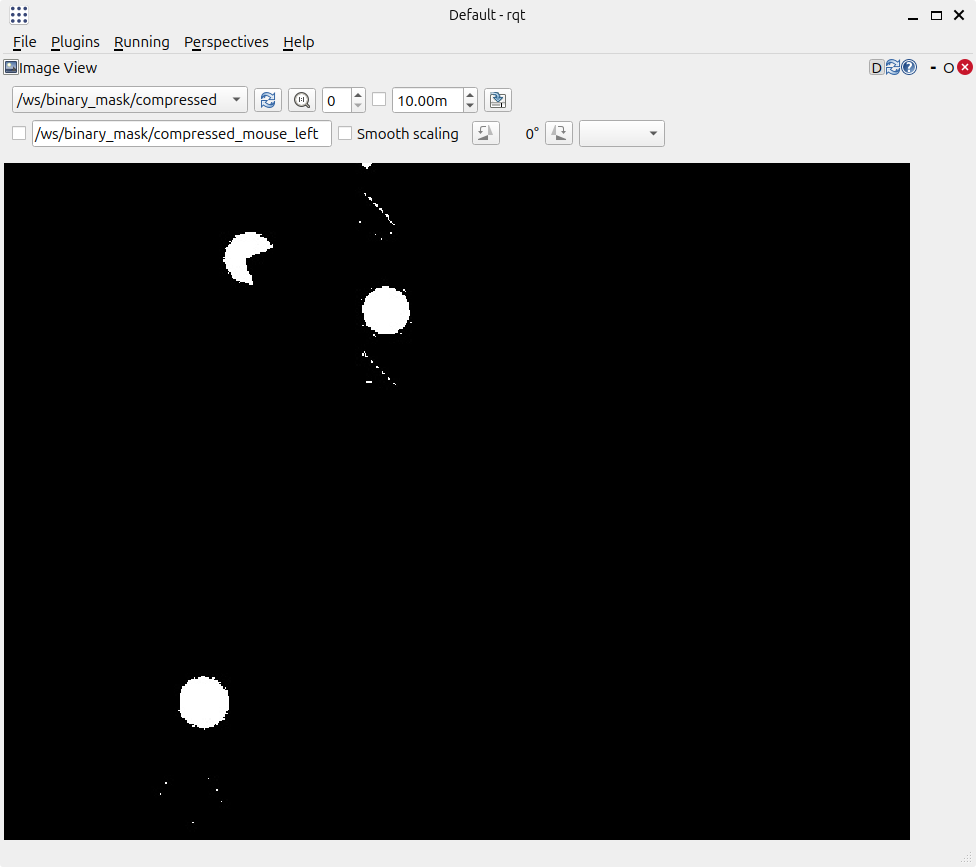
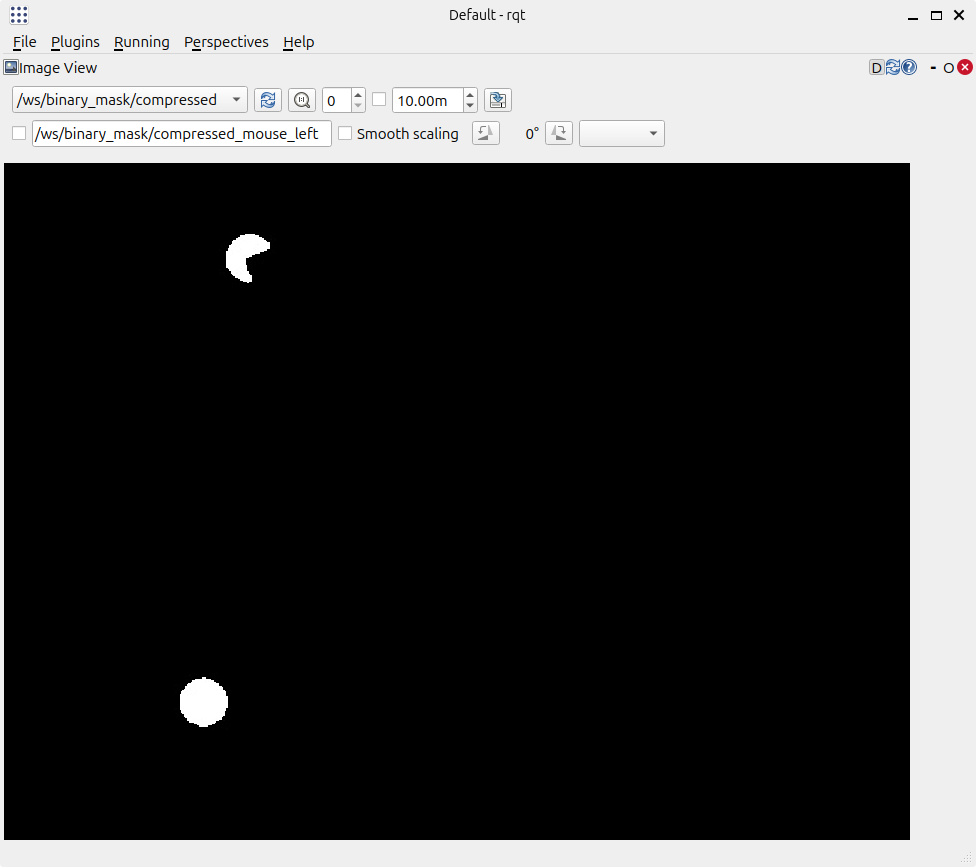
Улучшения качества изображения
Демонстрация проблемы
 |  |
ros2 launch lesson_07 main.launch.py lesson_num:=2На уровне OpenCV
Ядро (kernel)
Ядро скользит по изображению (см. рисунок)
Пиксель в результирующем изображении зависит от
пикселей исходного изображения
пикселей ядра
операции над пикселями исходного изображения
Варианты ядер
Opening = Erosion + Dilation
Исходное: |  | |
Errosion, dilation |  |  |
Openging |  | |
Closing = Dilation + Erosion

Выделение контуров
Постановка задачи
Нужно отсеять оставшиеся мелкие контуры
Нужно посчитать площадь объекта
Нужно определить границы объекта
ros2 launch lesson_07 main.launch.py lesson_num:=3
Исходный код
Дополнительные материалы
Цветовые пространства
Иные цветовые пространства
DOI:10.1007/s13319-019-0229-8
Сегодня я многое понял
Основы классических алгоритмов компьютерного зрения
Цветовые пространства
Сервер параметров ROS

Дополнительные материалы
Морфологические операции в OpenCV https://docs.opencv.org/4.x/d9/d61/tutorial_py_morphological_ops.html | https://docs.opencv.org/4.x/d9/d61/tutorial_py_morphological_ops.html |
Сервер параметров |  https://docs.ros.org/en/jazzy/Tutorials/Beginner-CLI-Tools/Understanding-ROS2-Parameters/Understanding-ROS2-Parameters.html |