$ sudo apt install v4l-utils # Утилита для работ с камерами
$ sudo apt install qv4l2 # Графическая утилита для работы с камерой
$ sudo apt install python3-opencv # Библиотека для работы с CV
$ sudo apt install \*jazzy-compressed* # ROS, для работы с сжатыми изображениями
$ sudo apt install ros-jazzy-usb-cam # Нода для работы с usb-камерами
$ sudo apt install ros-jazzy-camera-calibration # Нода для калибровки камерыОсновы программировния морских роботов
Работа с видеокамерой
План занятия
Зачем нам работать с камерами?
Подготовка окружения
Video4Linux (V4L)
v4l2-ctl: список устройств
v4l2-ctl: об устройстве
v4l2-ctl: форматы и разрешения
v4l2-ctl - управление параметрами
qv4l2
OpenCV
OpenCV - библиотека алгоритмов компьютерного зрения, обработки изображений и т.д.
Принадежит intel, существенную роль в разработке оказала компания itseez (Россия)
На сегодняшний день - де-факто стандарт в "классическом" CV
Но нейросети существенно потеснили классическое CV
Получение изображения
Изменение изображений: рамки
Изменение изображений: добавление текста
ROS
usb-cam-node
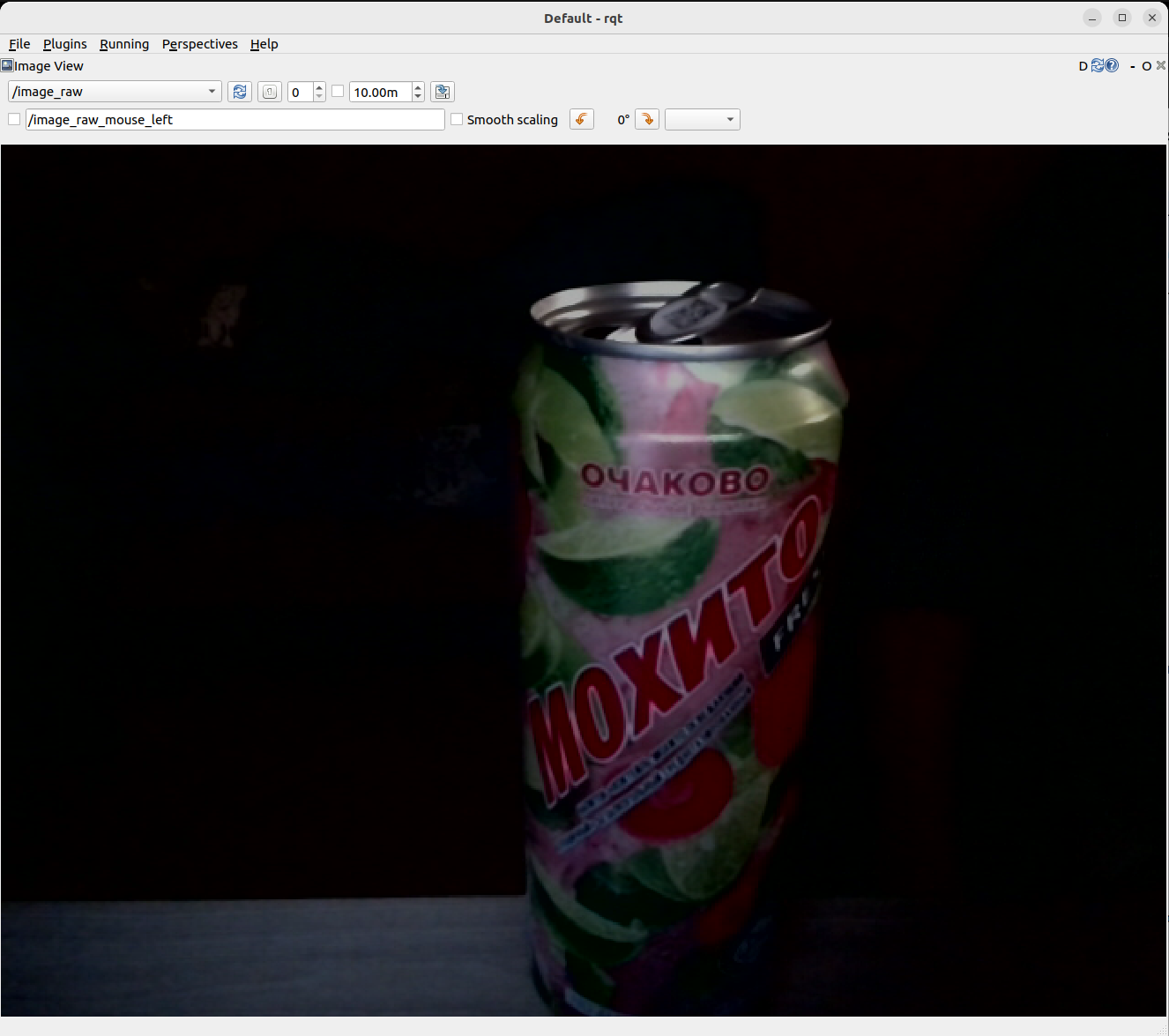
простой запуск публикации изображения с камеры
ros2 run usb_cam usb_cam_node_exe --ros-args \ -p video_device:=/dev/video0В RQT:
Plugins→Visualization→Image Viewв появившемся окне надо выбрать топик с изображением
Параметры ноды
Использование параметров
Работа с изображениями в ROS2
Приём и передача данных
Взаимодействие с OpenCV
Калибровка камеры в ROS
Калибровка камеры в ROS
Как проходит калибровка в ROS2?
Используется пакет camera_calibration
Применяется классический метод с шахматной доской (checkerboard)
Шахматную доску надо клеить на плоскую поверхность
Как проходит калибровка в ROS2?
Как проходит калибровка в ROS2? Практика
Запуск запуск видеопотока ROS
Запуск калибровки
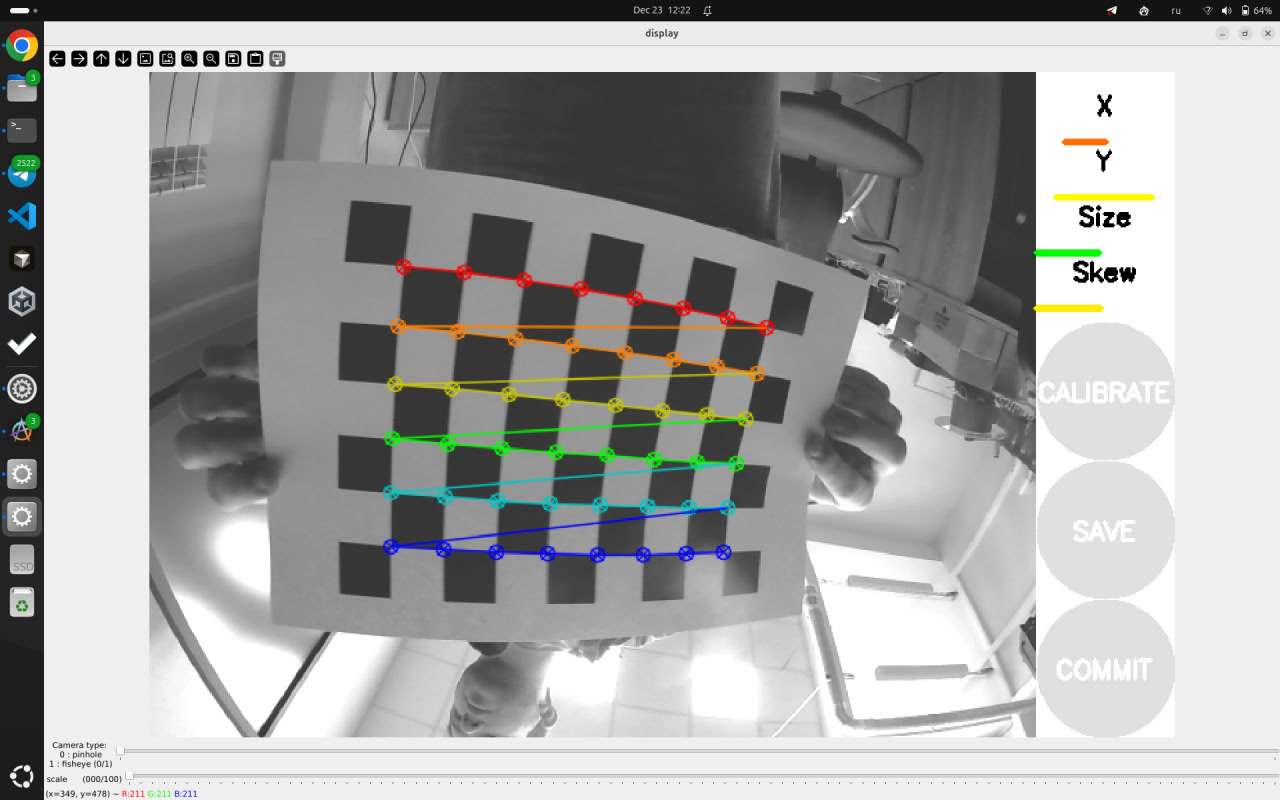
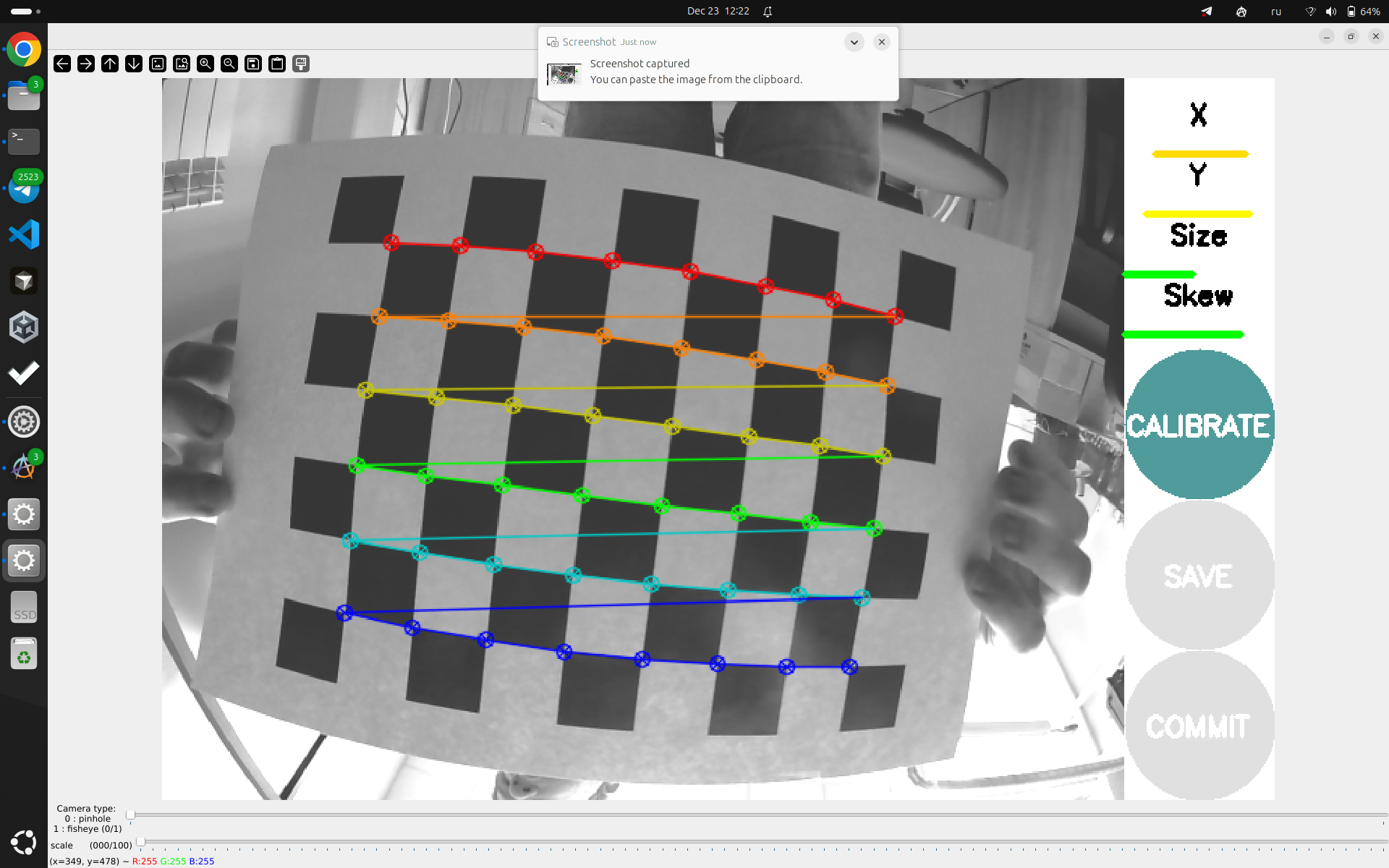
Калибровка
Для полной калибровки необходимо запонить все пункты (x,y, size, skew) до появления активной кнопки calibrate

Калибровка x и y
Для калибровки первых двух парамеров нужно перемешать данную шахматную доску по данным осям.
x - горизонтальное перемещение
y - вертикальное
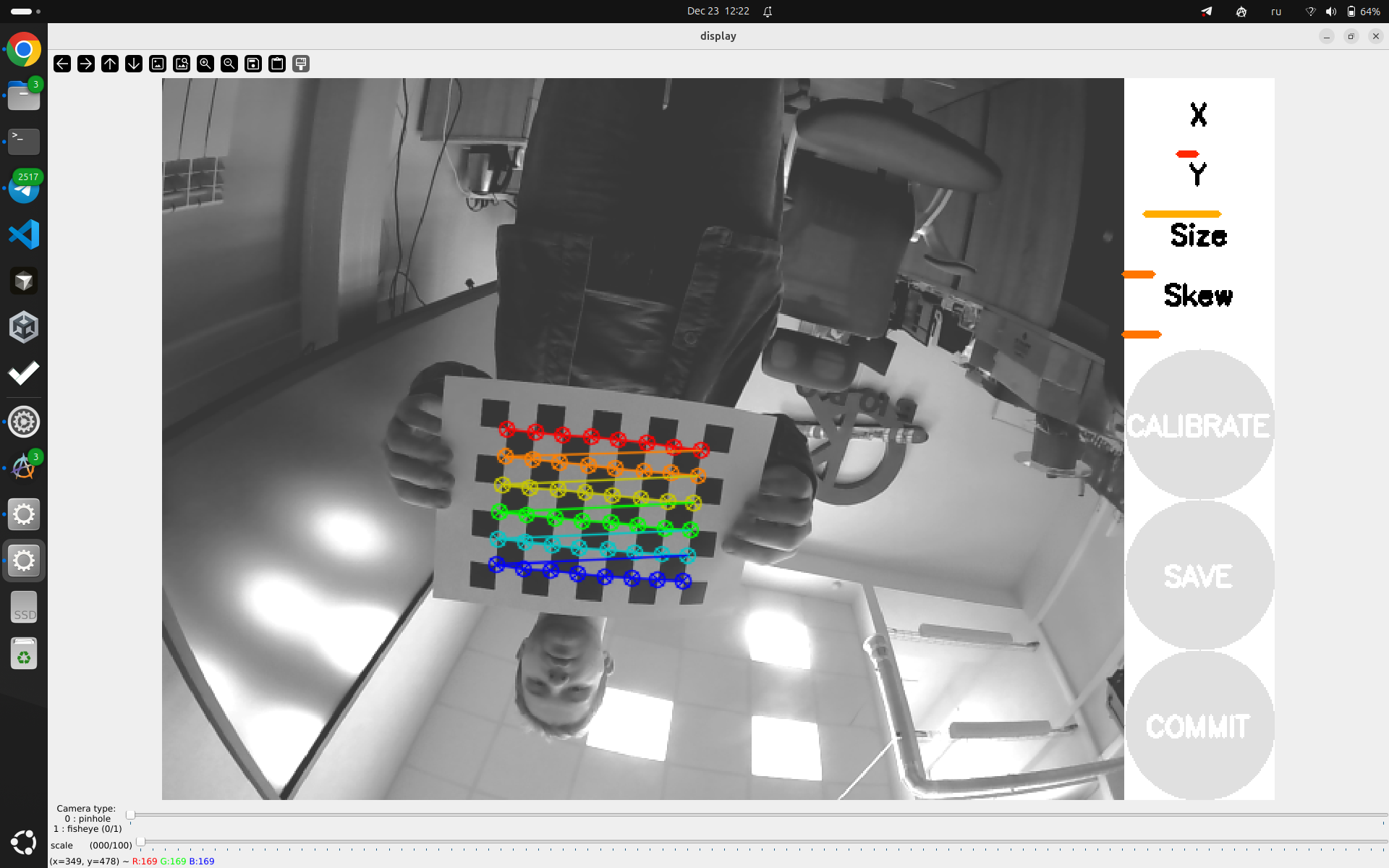
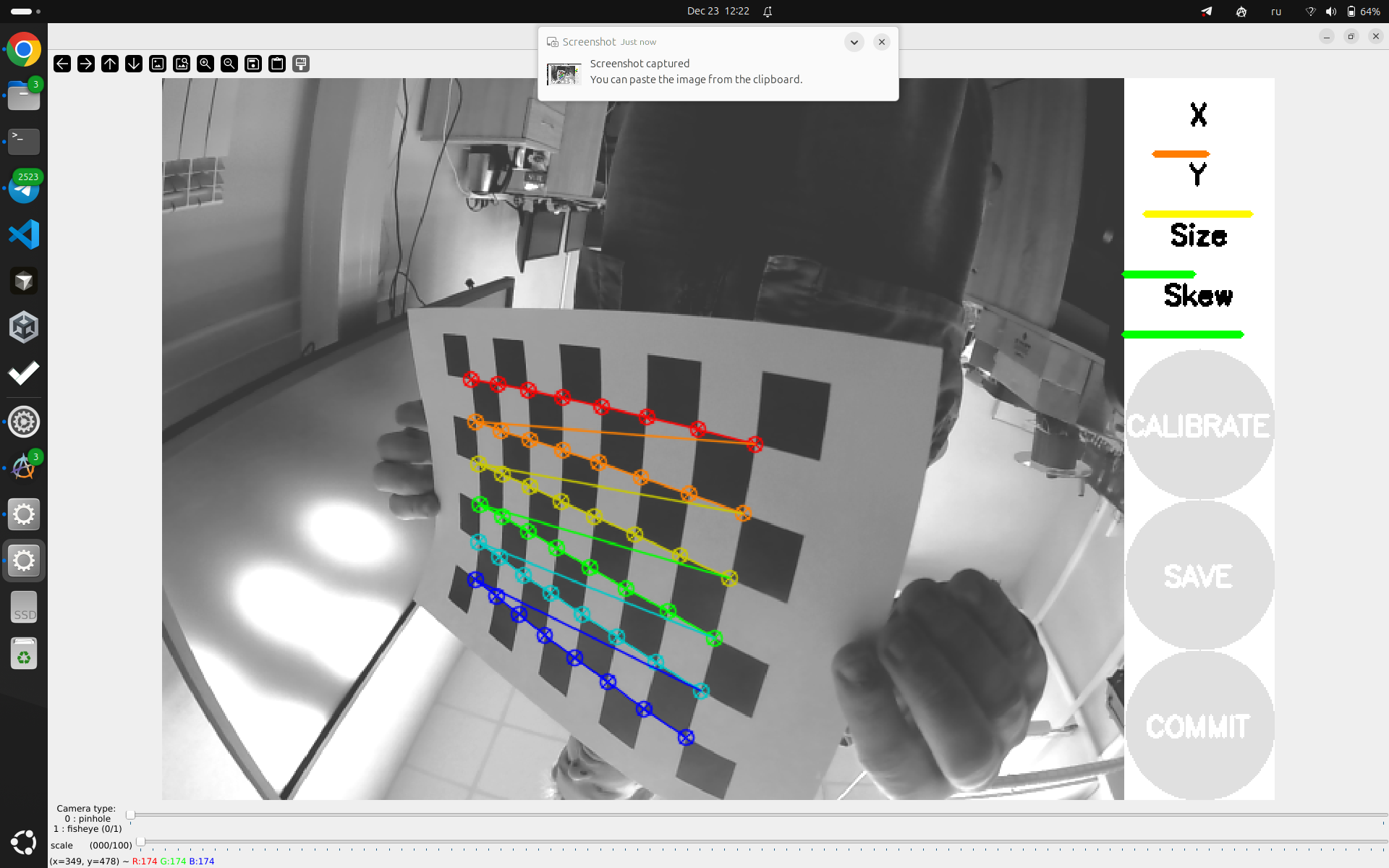
Калибровка size
Для калибровки парамера size нужно изменять размер данной шахматной доски относительно камеры (приближать и отдалять).
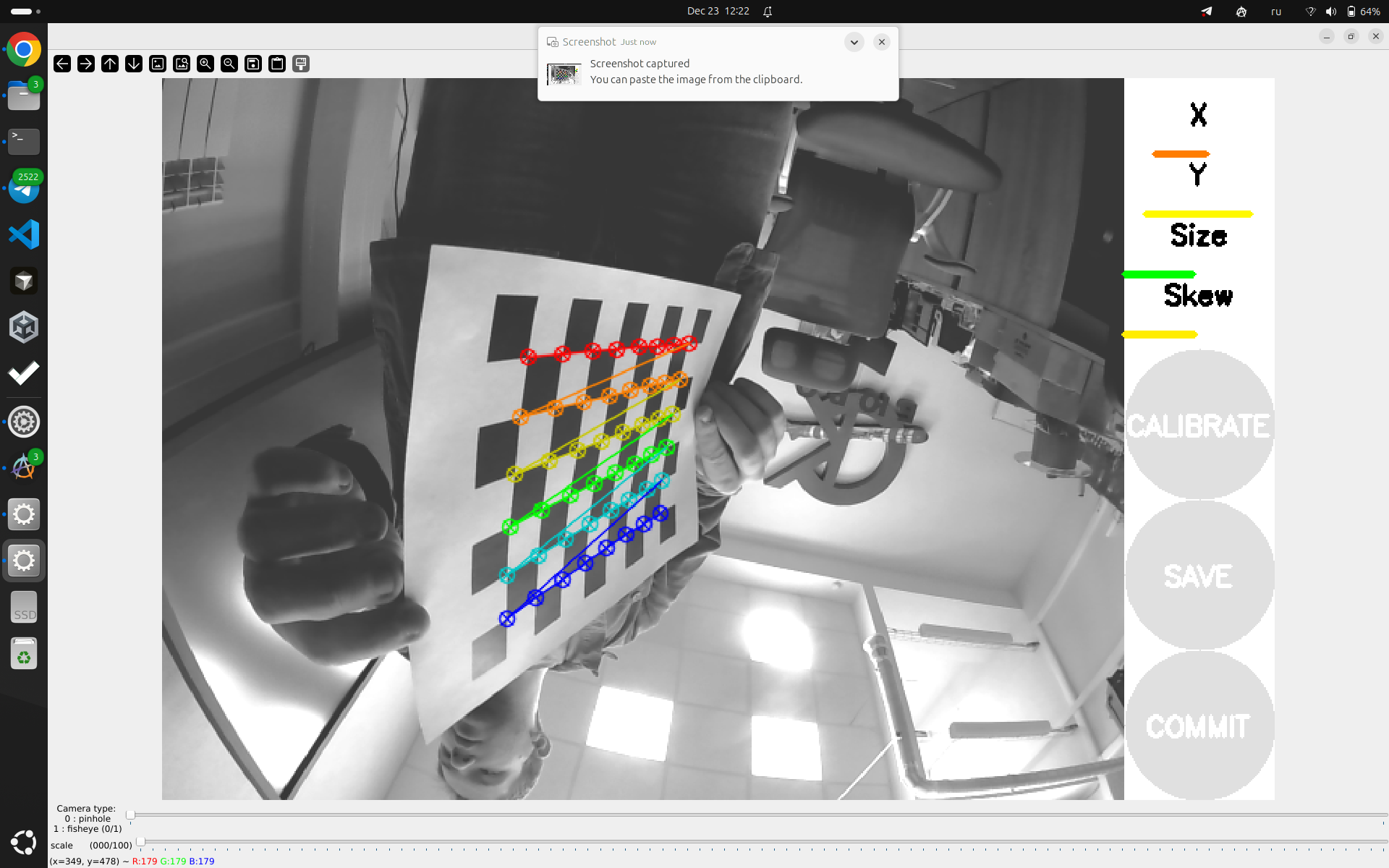
Калибровка skew
Для калибровки парамера skew нужно откалиборвать искажения шахматной доски относительно камеры.
Почти готово
Как только мы и программа готова откалибровать камеру
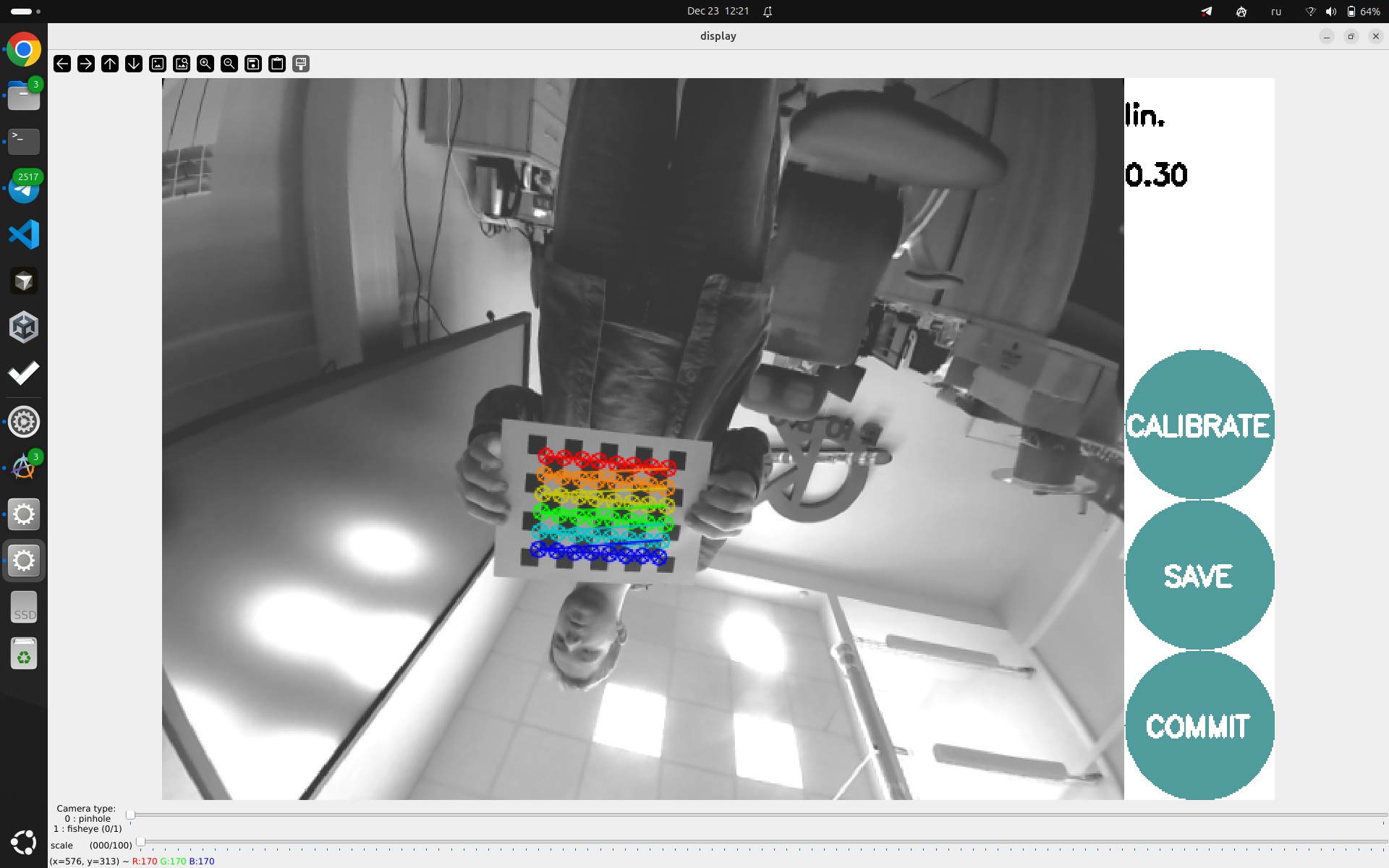
calibrate
save
Файлы с калибровкой сохраняется в папку
/tmp/
Готово
Сегодня я многое понял
Как работать с камерами в Linux
Как работать с библиотекой OpenCV
Как обрабатывать изображения в ROS