Так тяжкий млат, Дробя стекло, кует булат А. С. Пушкин, «Полтава»
Основы программировния морских роботов
Обратная связь в ROS
Организационная информация
План занятия
Подготовка рабочего места и упрощение жизни
Доустановка пакета
Рабочая папка
Файл .bashrc
Подготовка рабочего места: симулятор и взаимодействие с ним
Подготовка рабочего места: новый репозиторий
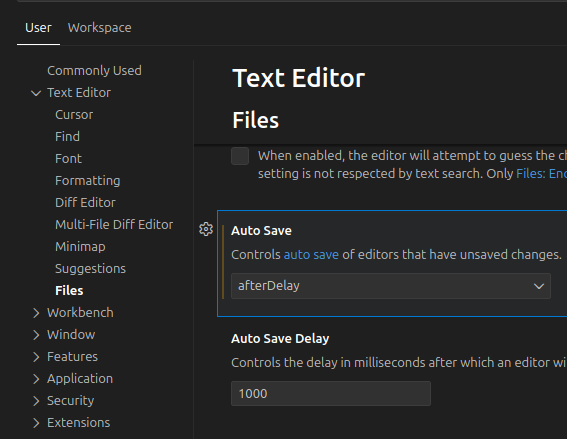
Упрощаем жизнь: автоматическое сохранение файлов
File → Preferences → Settings
Text Editor → Files → Auto Save
After Delay
Упрощаем жизнь: launch-файл
Пример из прошлого урока
Подробнее
Пример 'launch/main.launch.py'
Материалы
Почему черепаха не двигалась по квадрату?
В предыдущих сериях
мы поворачивали не на угол, а в течение какого-то времени
мы не знали свою ошибку и не могли корректировать её (система не была 'робастной')
 |
 |
Примеры принципиально неизвестных внешних воздействий
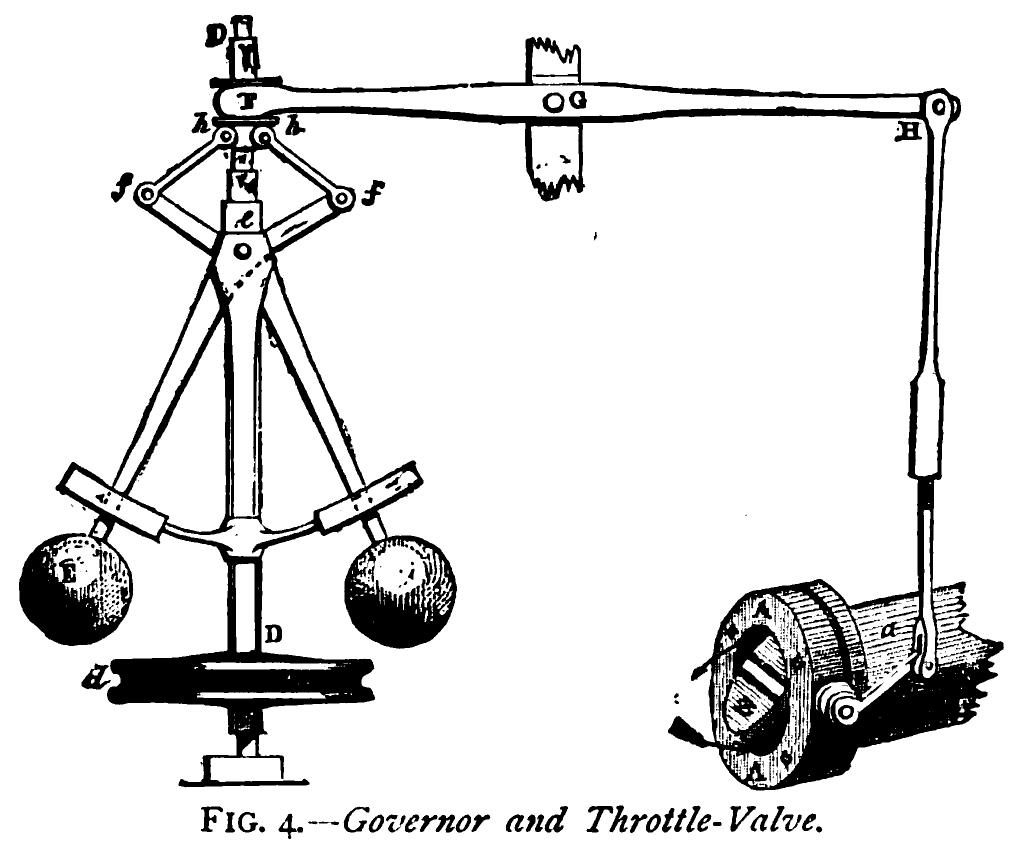
Страница истории
16** - Христиан Гюйгенс создаёт центробежный регулятор для ветряной мельницы
1788 - Джеймс Уатт адаптирует регулятор для паровой машины
Без регулятора с обратной связи паровая машина не могла применяться массово.
 |
 |
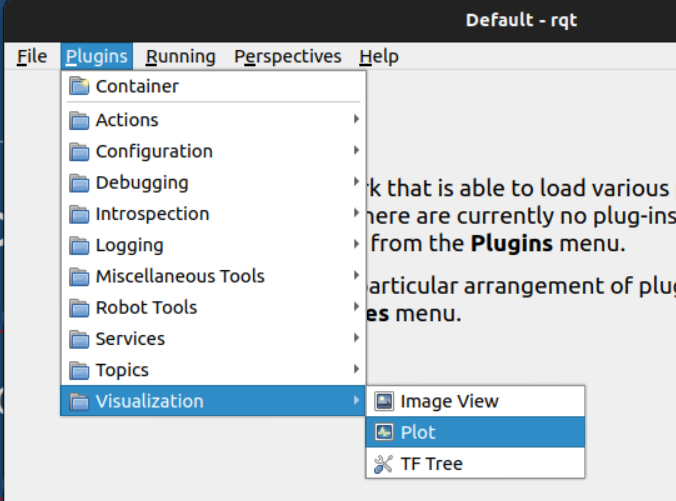
Построение графиков в ROS
запускаем:
ros2 launch lesson_05 \ main.launch.py lesson_num:=0rqt
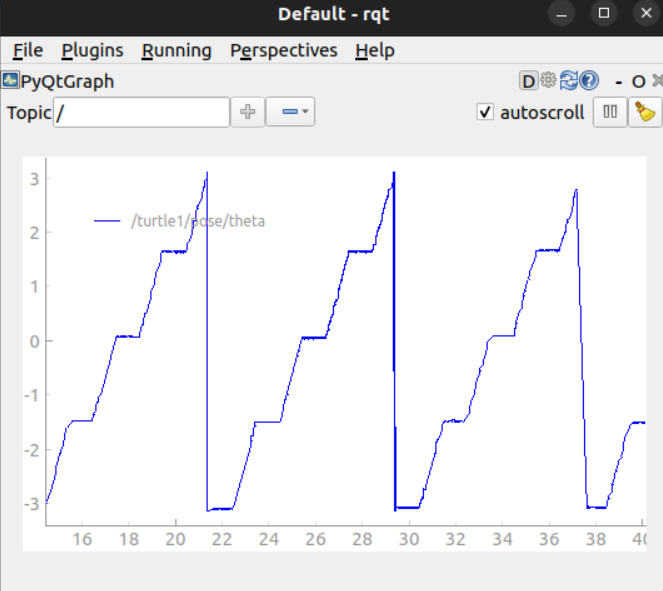
Plugins → Visualization → Plot
/ws/turtle1/pose/theta
x: 5.544444561004639 y: 5.544444561004639 theta: 0.0 linear_velocity: 0.0 angular_velocity: 0.0
 |
 |
Как получить данные в ноде ROS?
Пример 1: subscriber, callback
Решаем проблему с потоками
Было:
Стало:
Пример 2: улучшаем main
Регуляторы (обратная связь)
Пример 3: уставка/целевое значение/setpoint
Пример 3: дискретный регулятор
Пример 3: проблема с углами
Пример 4: Проблема дискретного регулятора
ros2 launch lesson_05 main.launch.py lesson_num:=4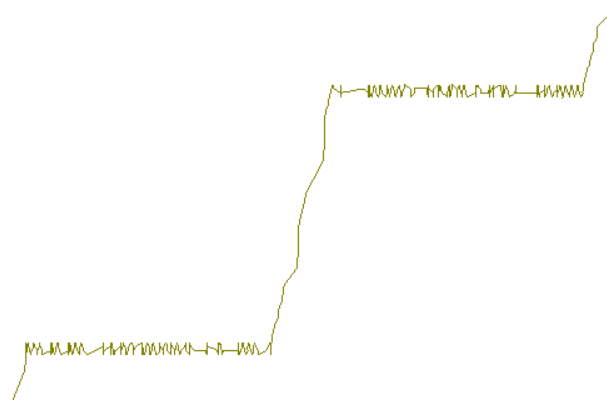
ПИД-регулятор
Как получить курс от катамарана в симуляторе?
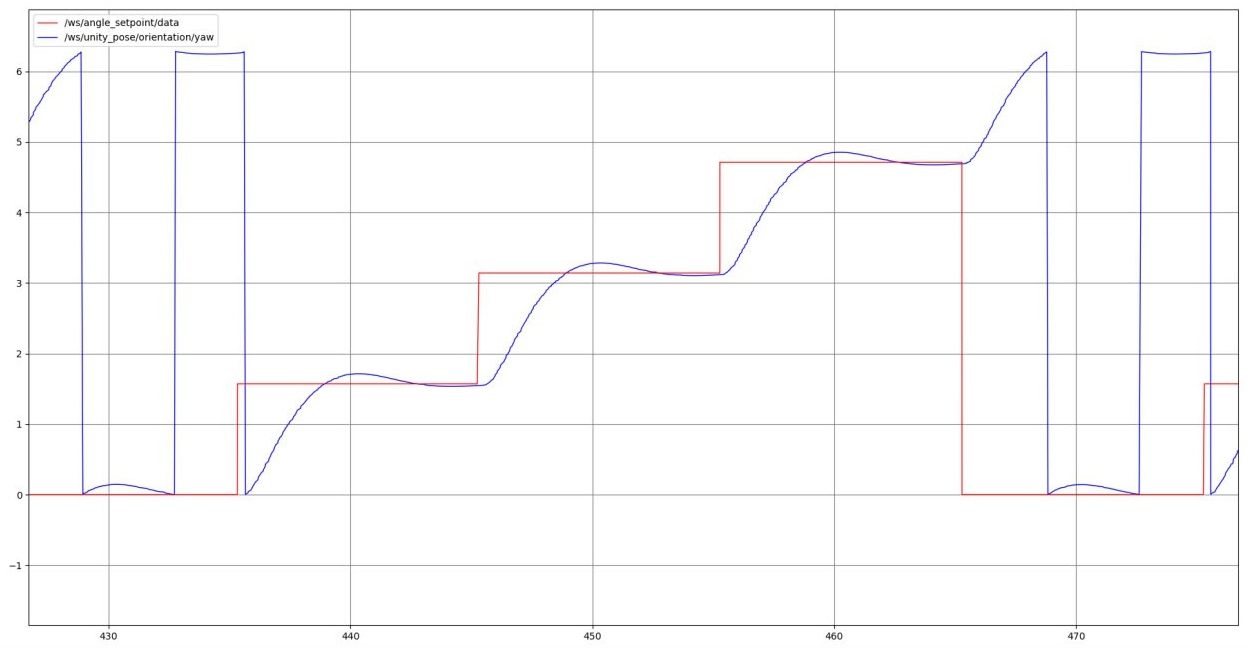
Пример 5: Дискретный регулятор для симулятора
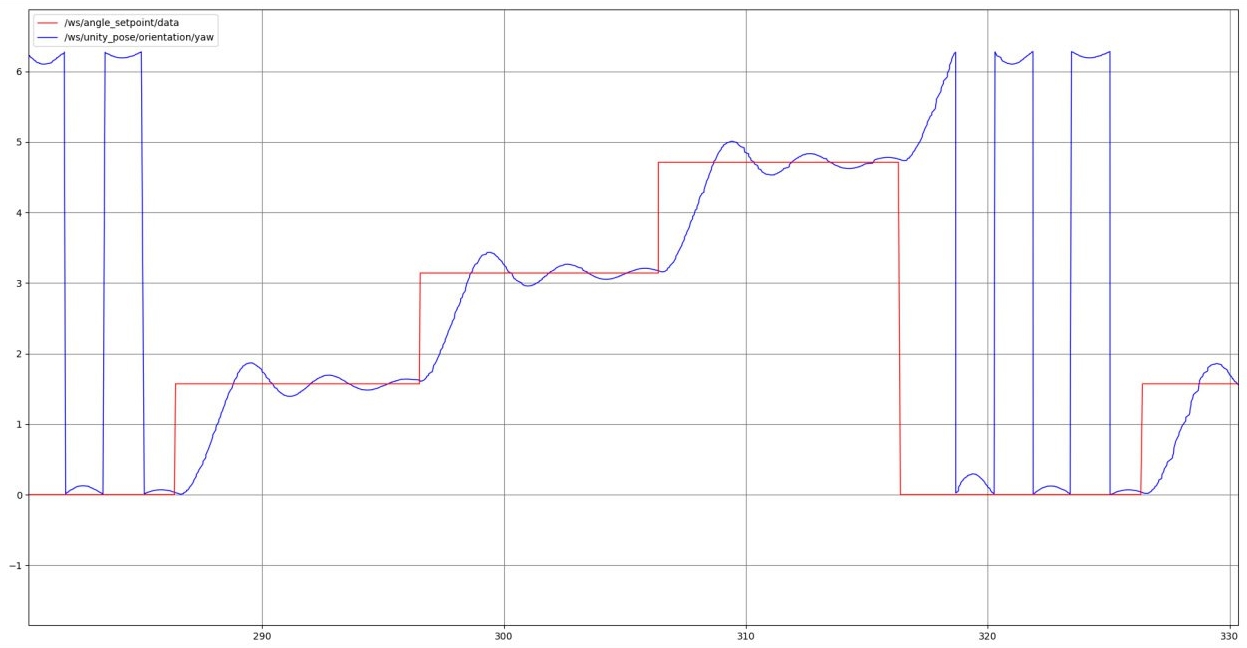
П-регулятор
Автоколебательный процесс
ПД-регулятор
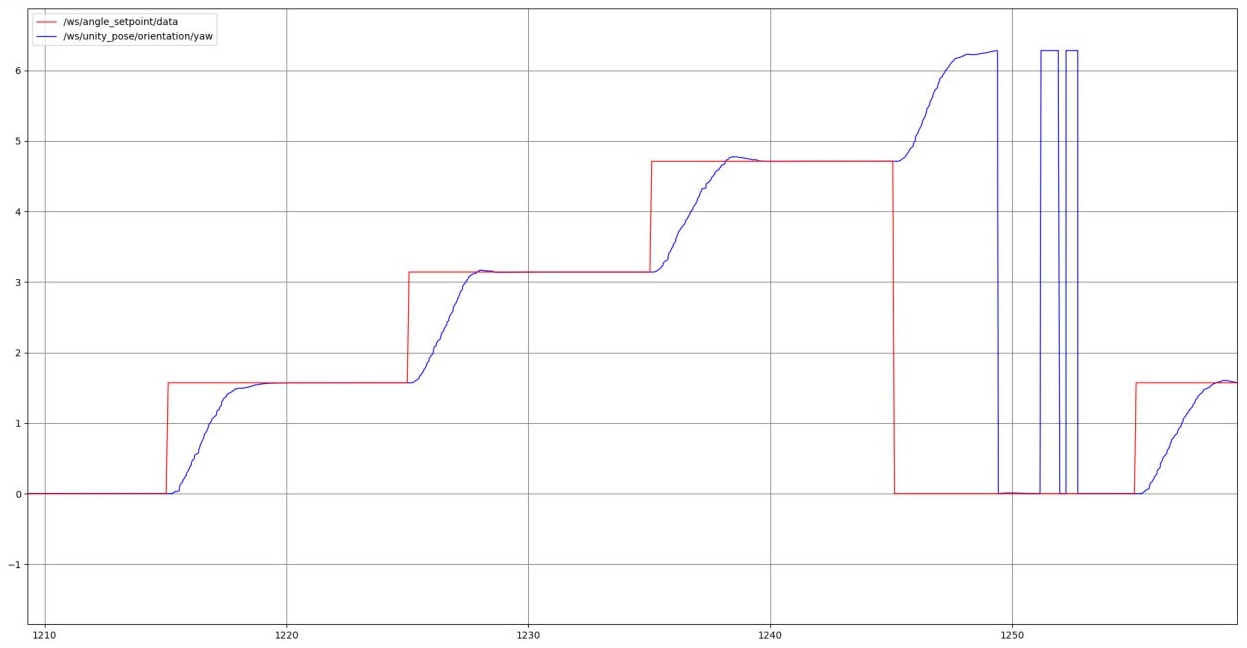
ПД-регулятор
Как получить курс от катамарана в жизни? (Спойлер: сложно)
Магнитные компасы работают плохо, особенно в бассейне
Спутниковые компасы дорогие и в помещении не работают
Механические, волоконно-оптические, лазерные гироскопы очень дорогие и большие
Но печать - дешёвая!
 |
 |
Слежение за Aruco-маркером
Aruco c нормальным регулятором
Сегодня я многое понял
symlink-install
Launch-файлы
Зачем нужны регуляторы?
Построение графиков в ROS
Обратная связь в ROS
Регуляторы