sudo apt install ros-jazzy-desktopОсновы программировния морских роботов
Основы ROS
План занятия
Общие сведения о ROS
не ОС а framewrok
модульная структура (принуждает писать код лучше)
использует Яндекс, Starline и сотни других компаний
большое сообщество разработчиков (>30к репозиториев на github)
 |
 |
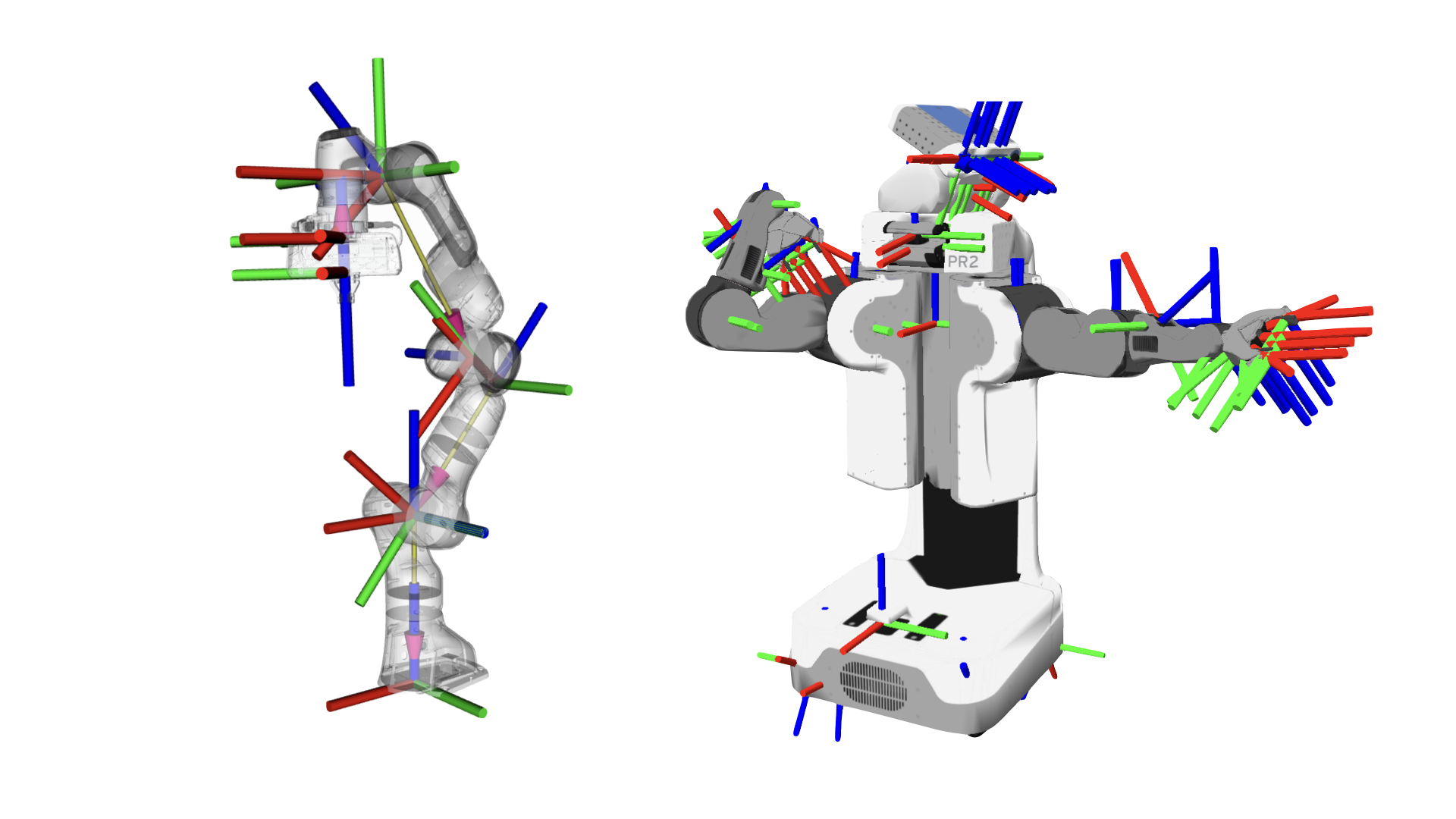
Выдающиеся модули: tf2
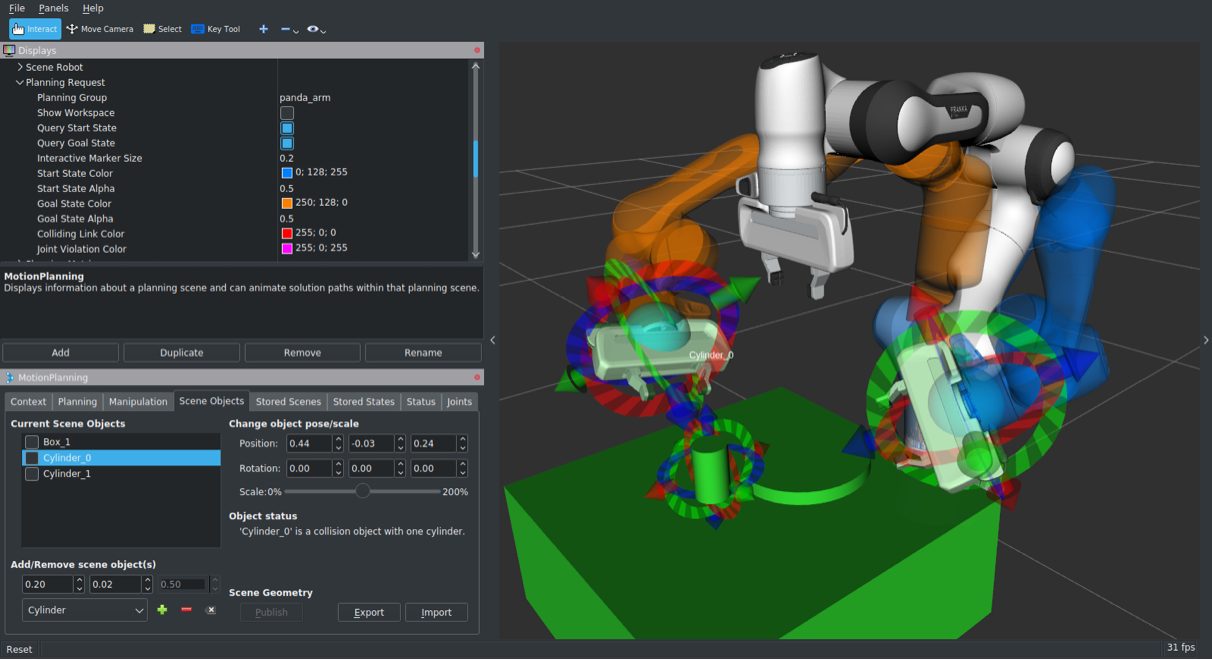
Выдающиеся модули: movit
Выдающиеся модули: nav2
Установка ROS2
Базовый пример: turtlesim
$ ros2 run turtlesim turtlesim_node
$ ros2 run turtlesim turtle_teleop_key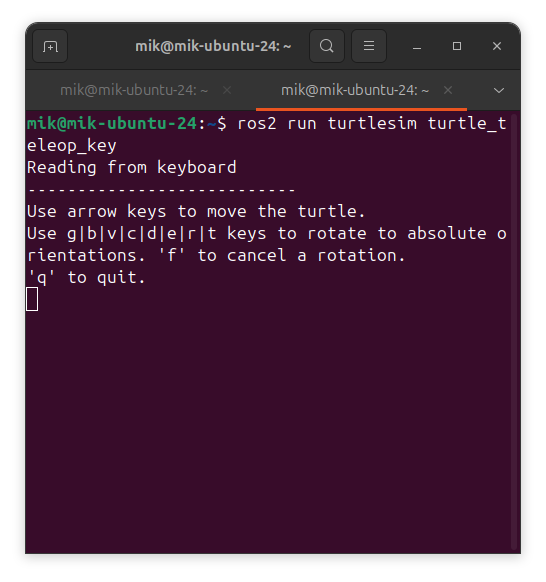 |
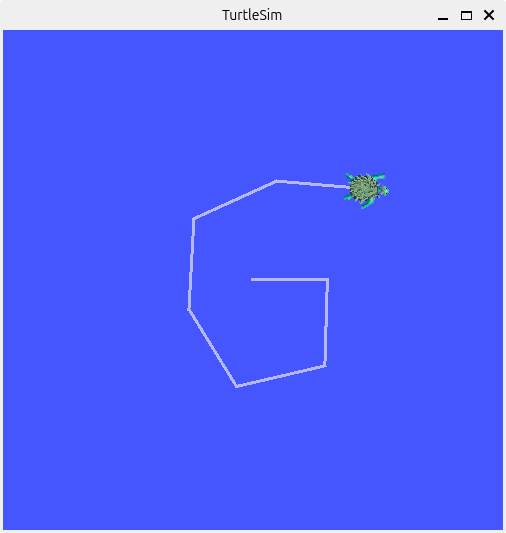 |
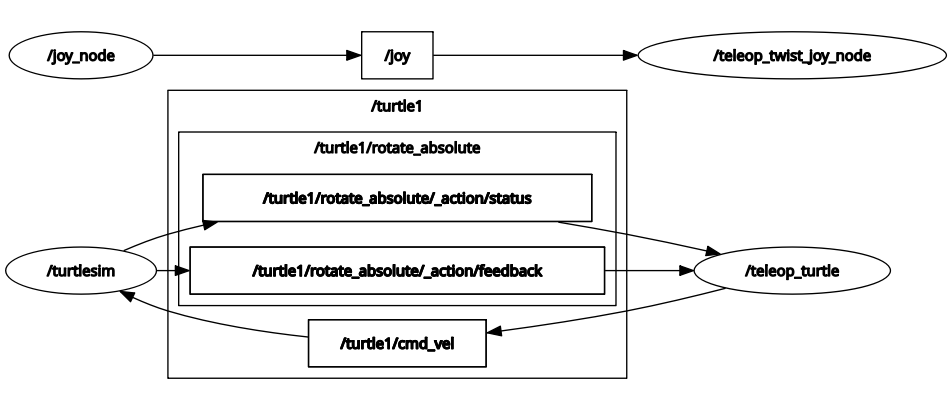
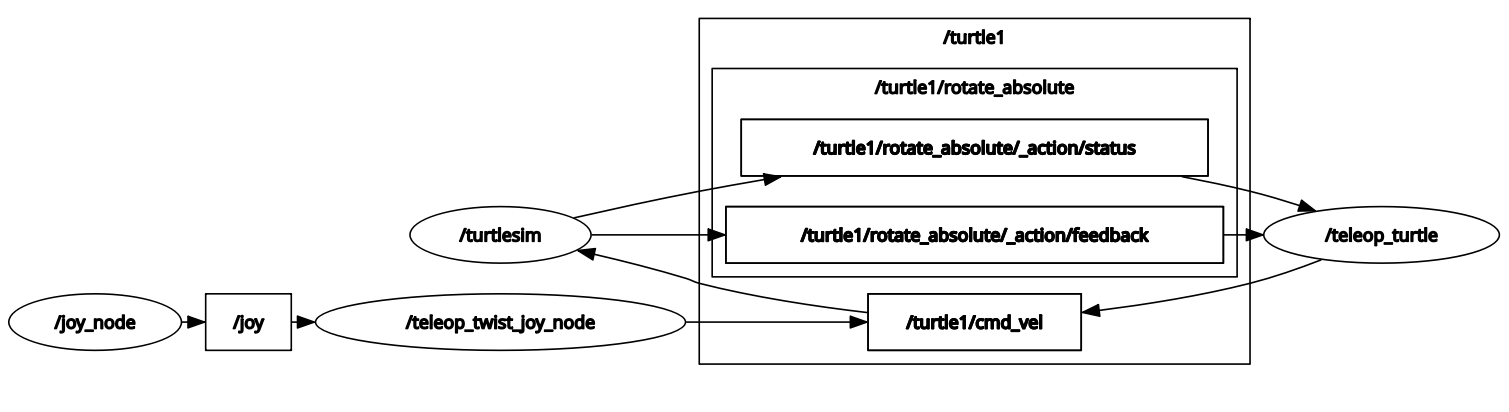
rqt_graph
Node, topic, publisher, subscriber
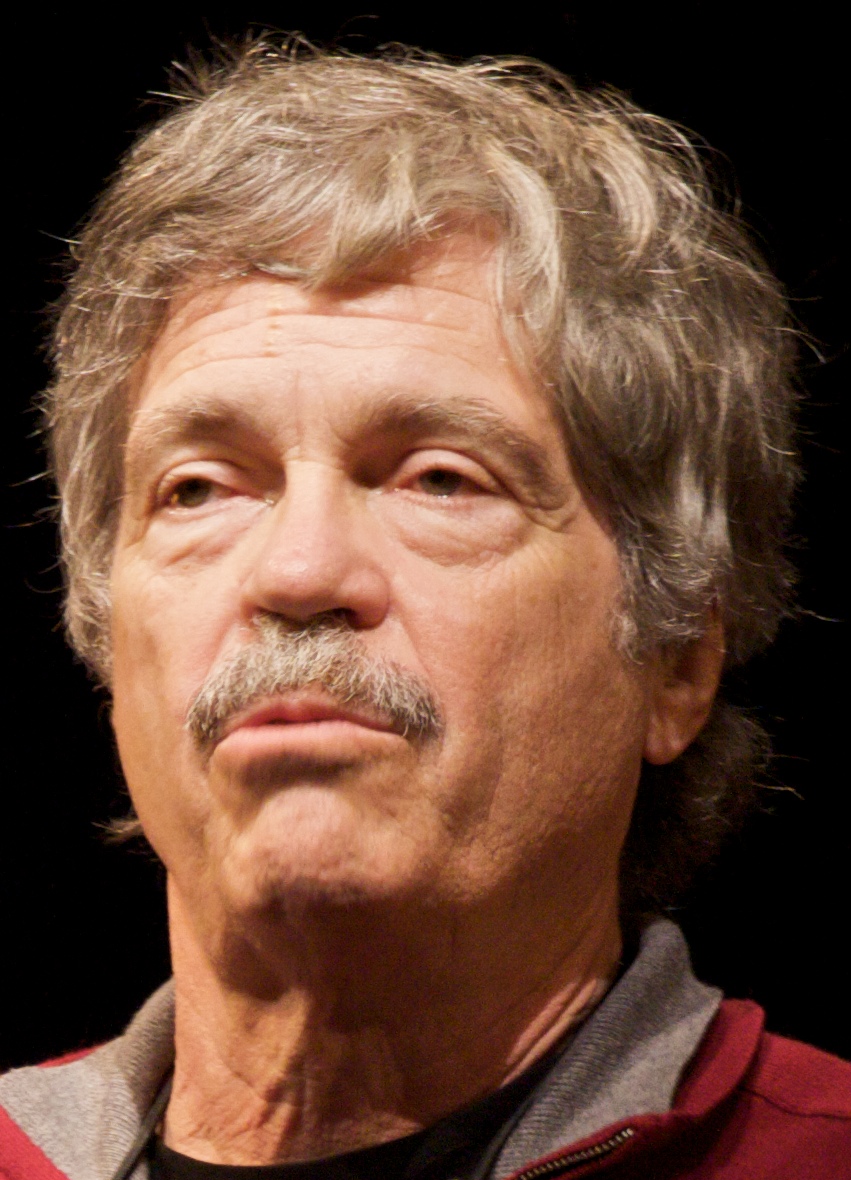
Алан Кей (приблизительно в 1967)
Я представлял объекты как биологические клетки и/или отдельные компьютеры в сети, способные общаться только при помощи сообщений Источник
Кратко:
Инструменты
ros2 node
ros2 topic
Пример описания сообщения
Усложняем: джойстик
$ ls /dev/input/js*
$ ros2 run joy joy_node --ros-args -p dev:="/dev/input/js0"
$ ros2 topic list
$ ros2 topic info /joy
$ ros2 topic echo /joy |
Преобразуем тип данных
Как есть
Как надо
Remaping
Работаем с симулятором
Скачиваем и запускаем
Телеуправление: подготовка
Телеуправление: remap в топик /ws/twist_pilot
Усложняем: джойстик
remap: добавляем черепаху
Смотрим rqt_graph
Сегодня я многое понял
Установка ROS2
Что такое ROS и почему он нужен?
Простой пример
Консольные инструменты
remaping
Управление симулятором

Дополнительные материалы
Домашнее задание
Подсказки

ros2 run twist_stamper twist_unstamper --ros-args \
-r cmd_vel_in:=/mouse_vel -r cmd_vel_out:=/turtle1/cmd_vel